-

-
-
TEMA Pro 運動圖像分析軟件

- 品牌:瑞典Image systems
- 型號: TEMA Pro
- 產(chǎn)地:歐洲 瑞典
- 供應(yīng)商報價:面議
-
廣州市元奧儀器有限公司
 更新時間:2025-04-14 09:54:28
更新時間:2025-04-14 09:54:28 -
銷售范圍售全國
入駐年限第6年
營業(yè)執(zhí)照已審核
- 同類產(chǎn)品運動圖像分析軟件(5件)

立即掃碼咨詢
聯(lián)系方式:400-822-6768
聯(lián)系我們時請說明在儀器網(wǎng)(www.ghhbs.com.cn)上看到的!
掃 碼 分 享 -
為您推薦



產(chǎn)品特點
- TEMA Pro軟件由瑞典Image Systems公司開發(fā),該公司成立于1988年,專注于開發(fā)和銷售運動分析解決方案。經(jīng)過30余年的發(fā)展,其客戶現(xiàn)已遍布全球,包括生物、工業(yè)、科研等諸多領(lǐng)域
詳細介紹
TEMA Pro軟件由瑞典Image Systems公司開發(fā),該公司成立于1988年,專注于開發(fā)和銷售運動分析解決方案,。經(jīng)過30余年的發(fā)展,其客戶現(xiàn)已遍布各地,包括生物、工業(yè)和科研等諸多領(lǐng)域, 其產(chǎn)品已被廣泛應(yīng)用到汽車安全測試、工業(yè)設(shè)備研發(fā)、裝備測試開發(fā)和科學(xué)研究等諸多領(lǐng)域。越來越多的客戶 選擇Image Systems運動分析軟件來獲取研究、設(shè)計、測試或故障處理等過程中的關(guān)鍵數(shù)據(jù) 。
自2012年始,元奧儀器與瑞典Image Systems AB簽署一級代理協(xié)議,開拓在體育醫(yī)療、交通運輸?shù)雀咚賵D像分析市場, 為用戶提供世界前沿的高速運動跟蹤分析應(yīng)用的軟件與整體解決方案..
TEMA Pro軟件是一款高級運動分析軟件,在科研和行業(yè)檢測等領(lǐng)域具有領(lǐng)先地位。 TEMA Pro 具有精度高、模塊化、運算快、操作界面簡潔易用等特點,廣泛應(yīng)用于各個領(lǐng)域。如3C產(chǎn)品的跌落試驗、生物力學(xué)分析、運動裝備性能分析、汽車生產(chǎn)于被動安全測試、科學(xué)研究等。
軟件標(biāo)配豐富的跟蹤算法庫,幾乎可以跟蹤分析任意類型目標(biāo)物,即使沒有標(biāo)記點的情況下也可以準(zhǔn)確識別目標(biāo)物并進行分析,適應(yīng)各類復(fù)雜的運動軌跡以及相對惡劣的分析條件。算法主要基于模板識別及灰度判別運算,最高跟蹤精度高達0.01個像素。
TEMA Pro 在 TEMA Classic 的基礎(chǔ)上,提供先進的輪廓跟蹤算法和數(shù)字圖像相關(guān)法(DIC),更支持工程瀏覽器、三維模型導(dǎo)入、氣囊體積計算等功能,覆蓋的領(lǐng)域更廣泛,功能更強大。
跟蹤算法 ---擁有大量的不同的跟蹤算法以用于不同的應(yīng)用,所有的都充分利用跟蹤框架和在子像素內(nèi)的軌跡。
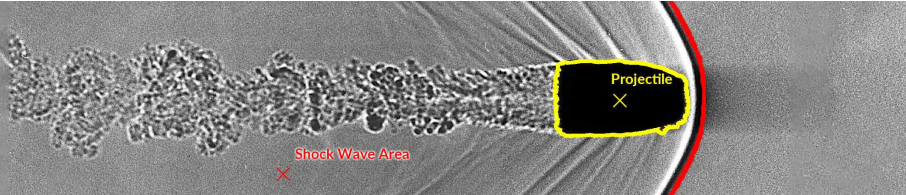
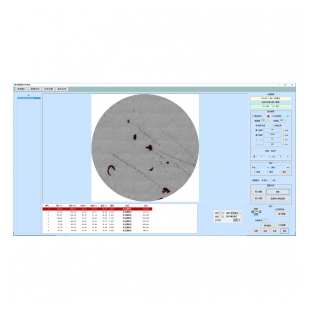
輪廓跟蹤算法在彈體紋影攝影中的應(yīng)用
CORRELATION 相關(guān)性跟蹤算法
使用相關(guān)性模板,在相鄰圖像限定區(qū)域內(nèi)尋找相似圖像內(nèi)容,實現(xiàn)持續(xù)跟蹤。
非常經(jīng)典的跟蹤算法,用戶無需在目標(biāo)物上貼標(biāo)記點,適用于幾乎任何類型,特別是無法貼標(biāo)記點的目標(biāo)跟蹤測試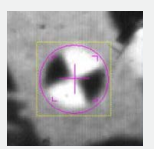
QUADRANT 象限跟蹤算法(寶馬標(biāo))
算法自動識別并鎖定象限標(biāo)記點(寶馬標(biāo))中心進行跟蹤。
跟蹤精度高,不確定度最低。可獲取象限目標(biāo)中心的坐標(biāo),也可用于單點測量角度變化量。需在目標(biāo)物體上粘貼象限標(biāo)記(寶馬標(biāo))進行輔助。
適用于對精度和自動跟蹤能力要求很高的應(yīng)用
VIRTUAL POINTS 虛擬點算法
通過跟蹤至少3個可見點的位置,對另外一個可見或不可見點的位置進行三角測量。不可見點可以是偶爾被遮擋、走出視野甚至一直不在視野的跟蹤點。
這些點必須屬于在同一剛體上并設(shè)為同一點組,才能應(yīng)用虛擬點算法。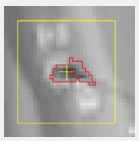
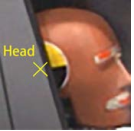
CENTRE OF GRAVITY 重心跟蹤算法
鎖定閉合輪廓或與背景形成對比的標(biāo)記/對象的重心,識別過程不受目標(biāo)縮放影響。
此跟蹤算法基于選區(qū)中圖像的灰度等級檢測,可以為深色或明亮的對象自動定義閾值,也可以使用0-255灰度級手動定義閾值。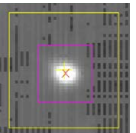
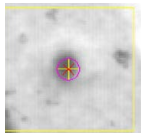
CIRCULAR 圓形跟蹤算法
適用于跟蹤圓形或同心圓標(biāo)記的被測物,包括圓形跟蹤算法、高級圓跟蹤算法以及圓對稱跟蹤算法,以適應(yīng)跟蹤分析同心圓、模糊不清/部分被遮蓋的圓形標(biāo)記等多種復(fù)雜的情況。

INTERSECTION 交叉點跟蹤算法
跟蹤任何對象形狀上的交點(角)。該算法通過沿那些邊緣外推直線來檢測對比邊緣的交集,并在必要時填充間隙。

CORNER CONTOUR 角輪廓跟蹤算法
檢測邊緣并沿著這些邊緣找到拐角,可選擇一個角作為跟蹤點。

MOUSE TRACKER 鼠標(biāo)跟蹤工具
若由于圖像質(zhì)量差而導(dǎo)致任何形式的自動跟蹤失敗,可使用鼠標(biāo)指針按順序手動跟蹤感興趣的對象。支持隨時調(diào)整播放速度以幫助用戶適應(yīng)手動目標(biāo)跟蹤的操作節(jié)奏。
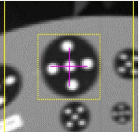
MXT (可選購) 在搜尋區(qū)域內(nèi)尋找左圖類型的跟蹤標(biāo)記。
用戶可在軟件中選擇識別1+4類型(4點圍繞1點)或者1+5類型(5點圍繞1點)。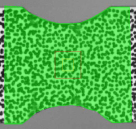
DIC 數(shù)字圖像相關(guān)法
通過跟蹤在試樣上的斑點圖案運動和變形, 分析全場位移和應(yīng)變,并用偽彩圖層直觀展示其數(shù)值大小與分布情況。 同時軟件提供數(shù)據(jù)檢測線、虛擬引伸計、興趣點等數(shù)據(jù)提取工具。在眾多應(yīng)用中取代傳統(tǒng)的應(yīng)變計。
* 三維分析需要選購三維模塊并使用2臺或以上相機
OUTLINE 輪廓跟蹤算法
提供3種算法模式, 捕獲目標(biāo)輪廓的變化: 1.基本輪廓模式, 適用于目標(biāo)輪廓與背景形成鮮明對比的情況; 2.高級輪廓模式,需要動態(tài)限制所關(guān)注對象內(nèi)部陰影和反射的灰度閾值。
3.Outline+模式, 極端背景抑制, 可配置參數(shù)的圖像處理, 可在惡劣的條件下以低對比度跟蹤對象的輪廓。鏡頭校準(zhǔn)

棋盤格鏡頭校準(zhǔn)板
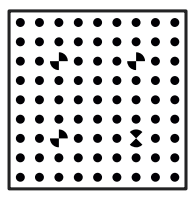
智能鏡頭校準(zhǔn)板
僅適用于TEMA Pro的自動鏡頭標(biāo)定
Image Systems 提供兩款鏡頭參數(shù)校正模板,有多種尺寸可選,以適應(yīng)不同運動分析場景。
校正流程簡單易操作:
1. 設(shè)置好鏡頭參數(shù)后,拍攝一組不同姿態(tài)的標(biāo)定板圖像序列;2. 將圖像序列導(dǎo)入TEMA Classic,按照提示添加手動添加四個主標(biāo)記點,執(zhí)行標(biāo)定程序;
3. 檢查校正結(jié)果,參數(shù)可導(dǎo)出。
------------------------------------------------------------------------------------------------------------
參數(shù)
可校準(zhǔn)的典型參數(shù)介紹
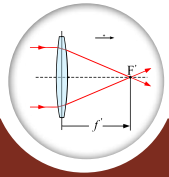


焦距 中心點 像素高寬比 畸變 焦距直接影響圖像測量的透視比例,常用于涉及多平面深度補償?shù)亩S坐標(biāo)計算,以及三維空間的目標(biāo)定位。
鏡頭對焦過程中,對焦環(huán)的調(diào)整相當(dāng)于焦距微調(diào),因此實際焦距可能與鏡頭標(biāo)稱焦距值或刻度焦距示數(shù)有偏差,需要校準(zhǔn)以提高分析精度。中心點表示圖像中畸變最小,且與攝像機光軸相對應(yīng)的點。
高速攝像機支持通過裁剪畫面的方式,提高拍攝幀率。部分攝像機更可在畫幅任意位置裁剪。因此需要先測量中心點的位置,才能正確套用畸變校正模板。像素高寬比(PAR),可理解為像素的“方正程度”,現(xiàn)在絕大部分攝像機的像素高寬比都為“1:1”。
然而使用像素數(shù)縮水的舊式設(shè)備,或使用了變形熒幕鏡頭拍攝所得的圖像,會被拉伸以適應(yīng)屏幕,此類非正方形像素需要校正。因鏡片的形狀缺陷所造成的畸變,稱為徑向畸變。徑向畸變又分為正向畸變和負向畸變,正向畸變稱為枕形畸變,負向畸變稱為桶形畸變。
在攝影過程中,此類畸變十分常見,必須通過畸變校準(zhǔn)以矯正圖像,最大限度降低圖像變形對分析結(jié)果的負面影響。
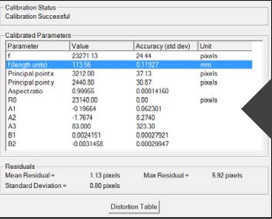
輸出結(jié)果
● 校準(zhǔn)結(jié)果的精度與殘差
● 測得實際焦距
● 中心點坐標(biāo)
● 像素高寬比
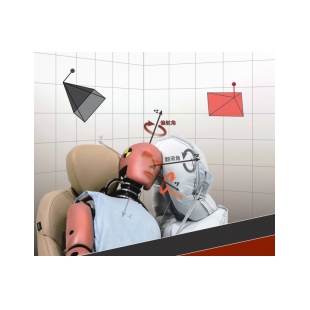
● 徑向畸變模型系數(shù)國內(nèi)外大量汽車制造企業(yè)、汽車零部件生產(chǎn)企業(yè)以及汽車檢測研究院,目前正在使用TEMA進行各種各樣測試,如整車碰撞、整車翻滾、氣囊點爆、鞭打試驗等等。TEMA為滑車測試提供全面的分析方案,實現(xiàn)動態(tài)坐標(biāo)系跟蹤與畫面防抖、多平行運動平面校準(zhǔn)及傾斜平面校準(zhǔn)
二維跟蹤是TEMA的基本功能。用戶可根據(jù)實際情況,調(diào)用合適的跟蹤算法,獲取圖像序列中的標(biāo)記點或其他跟蹤目標(biāo)的二維像素坐標(biāo)。配合比例尺,即可計算速度、加速度、距離、角度、角速度等運動學(xué)參數(shù)。
二維分析結(jié)果在三維或六自由度計算時,也將作為基礎(chǔ)數(shù)據(jù)。
TEMA提供各類基于時間同步的曲線圖和數(shù)據(jù)表,展示隨時間或外部導(dǎo)入數(shù)據(jù)變化的跟蹤結(jié)果數(shù)據(jù)。也有基于快速傅里葉變換的頻譜圖,反映振動頻率或運動周期。
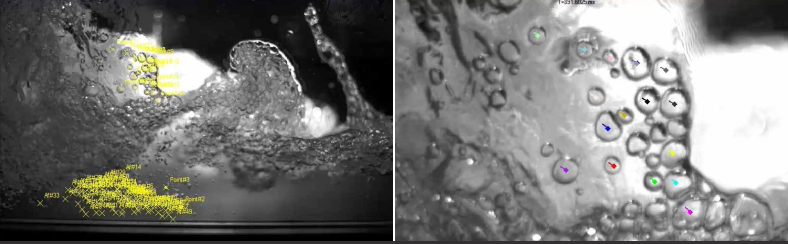
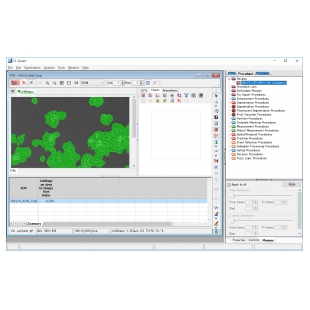
基于輪廓跟蹤算法,自動生成海量跟蹤點,持續(xù)自動跟蹤符合參數(shù)范圍的氣泡,可測量速度、角速度、軌跡、輪廓極點、面積、擬合體積,并統(tǒng)計數(shù)量。


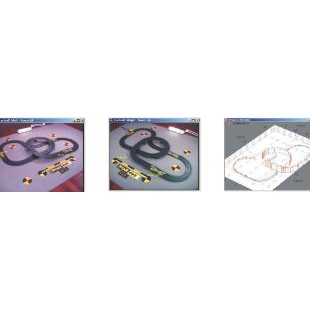
用戶可利用圖像中既有的跟蹤點,建立自定義坐標(biāo)系。
該坐標(biāo)系可以是靜態(tài)的,也可以是動態(tài)的。
動態(tài)坐標(biāo)系下,軟件會每幀重新計算一次坐標(biāo)系的位置
和方向,從而補償攝像機在像平面方向上振動,或分析兩
個目標(biāo)之間的相對運動。
若攝像機不垂直于運動平面,則透視畸變將影響測量結(jié)果的精度。 TEMA提供了幾種方法來計算攝像機相對于運動平面的
方位角和仰角,并對傾斜的圖像進行補償計算。


若圖像中存在位于不同深度的跟蹤點,而這些點仍平行于參考運動
平面移動,則TEMA可以通過輸入這些點的已知深度信息來補償,從而
減少由深度縮放問題引起的誤差。此功能還可以和傾斜平面校準(zhǔn)
(2.5D)同時使用。
可導(dǎo)出位置、速度、加速度、距離和角度的數(shù)據(jù)和曲線,
這些數(shù)據(jù)可按照時間順序排列,其相對參考系可靈活切換。
支持攝像機視圖、圖像圖表和曲線組合展示,導(dǎo)出為帶有標(biāo)題
和文本注釋的動畫序列,作為視頻報告。支持輸出多種格式:
txt, dat, excel, jpg, tif, bmp, avi, mp4, mpg, wmv等等。
上圖圓周跟蹤案例中,攝像機拍攝角度受限,無法俯拍,跟蹤點的運動軌跡變成橢圓。經(jīng)過TEMA的傾斜平面校準(zhǔn)后,軌跡還原為圓形
注:詳細請登錄廣州市元奧儀器有限公司(www.gzyaco.com),歡迎咨詢!
相關(guān)產(chǎn)品